











 수량을 선택해주세요.
수량을 선택해주세요.


CANHack 툴킷 CAN통신 개발 CANPico V2 보드 -MicroPython SDK
(CANPico v2 with Pico WH Pre-installed)
개요
- 본 제품은 CanisLab CANHack 툴킷 CAN통신 개발 CANPico v2 보드 -MicroPython SDK 입니다.
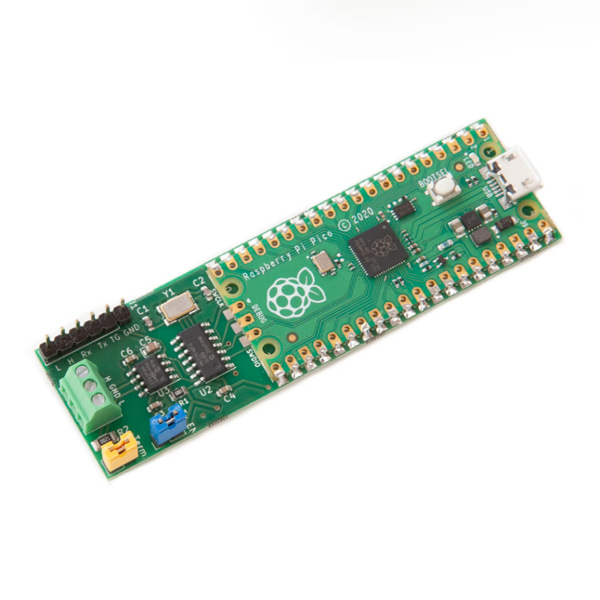
- 하드웨어적으로 보드를 설명하면, CAN 컨트롤러(MCP2517FD)와 CAN 트랜시버 및 라즈베리 파이 피코를 결합하여 만든 보드로 CAN 버스에 스크류터미널을 통해 접근이 가능합니다.
- CAN H, CAN L 신호 접근이 가능한 핀과, 오실로스코프나 로직분석기를 위한 디지털 RX, TX 신호를 포함하고 있습니다.
- 소프트웨어적으로는, Canis Labs 오픈소스 MicroPython SDK를 지원하여, 마이크로파이썬 SDK를 이용하여 다양한 CAN 어플리케이션 개발 및 응용하여 사용이 가능한 제품입니다.
- 이 SDK는 복잡한 CAN API(including priority-inversion free drivers, 1μs accuracy timestamps, large buffers and an API for triggering a logic analyzer or oscilloscope) 를 지원합니다.
- 또한 MIN 프로토콜을 이용하여 USB를 통해 호스트 장치와 통신을 지원하여, CAN 버스 로깅과 같은 어플리케이션을 가능하게 하며, CANPico 보드를 PC의 CAN 인터페이스로도 사용할 수 있게 합니다.
- SDK는 low-level error injection을 위한 CANHack tookit 또한 제공합니다.
- SDK는 파이썬 코드를 듀얼 코어 RP2040 마이크로컨트롤러에서 동작하며, 실시간으로 CAN 트래픽(밀리세컨드가 아닌 마이크로세컨드로 측정된)에 반응 할 수 있게하여 줍니다.
- Shipped with Pico WH and MicroPython pre-installed
특징
-
Main hardware features
- Microchip MCP251863T CAN controller
- Screw terminal for direct access to CAN High/Low twisted pair wiring and a common ground reference
- Jumper for a standard 120Ω CAN bus termination resistor
- Jumper for enabling and disabling transmit input to the transceiver
Interfacing
- Header pins for logic analyzer access to digital CAN signals (TX and RX pins of the transceiver)
- Header pins for oscilloscope access to the analog CAN signals (CAN High/Low, ground)
- TRIG pin for logic analyzer and oscilloscope triggering on programmable CAN events
- Direct GPIO access to CAN RX and TX pins for software error injection
- GPIO control over transceiver low power standby
The Raspberry Pi Pico is designed to be soldered on to a board using the ‘half moon’ edges, leaving header pins free. The other connections are USB (for power and connectivity to a host) and the CAN bus. The 6-pin header is intended for a logic analyzer and oscilloscope to see raw CAN signals, the yellow jumper is for enabling the termination resistor, and the blue jumper enables transmission on the bus (if this is removed then the board is restricted to only listening to the CAN bus, a useful security feature).
Software support
The software support is provided with a MicroPython SDK that has the following APIs:- CAN API
- CANHack toolkit API
- Trigger API for triggering test instruments on CAN errors and CAN frames with a specified ID and payload
- MIN API to communicate with a host PC over a second virtual USB serial port
The CAN API consists of the following Python classes:
- The CAN class provides control and status of the CAN controller
- The CANFrame class encapsulates CAN frames, which are either created in software or by receiving them from the CAN controller hardware
- The CANError class encapsulates CAN error frames, which are created receiving them from the CAN controller hardware
- The CANID class describes a CAN ID: every CAN frame has a CAN ID, but many frames can have the same ID
- The CANIDFilter class describes how a CAN controller should identify and accept CAN frames based on their CAN ID
The MIN API provides MIN protocol support for reliable communication with a host PC. Some of the CAN API calls use a binary representation to allow items to be carried over MIN.
문서
-
Resources
- TheHardware Reference Manual (PDF) for the CANPico board (version 01, issue date 2021-04-29, 8 pages) including schematics.
- TheMicroPython SDK Reference Manual (PDF) for the CANPico board (version 01, issue date 2021-04-29, 32 pages). Documents both the MicroPython CAN API and CANHack API.
- The latest firmware (.uf2, release date 2023-03-09). Based on the v1.15 release of MicroPython for the Pico. The source code is released as a patch file for this MicroPython version (see README.txt for details).
- The latest schematics (PDF) and Kicad design(.kicad_pcb) for the CANPico board.
- The canpico.py examples for the CANPico board (the Thonny IDE can be used to put the file on to the Pico file system)
- There is a blog post introducing CANHack and a demonstration video (Note that these both use the CANHack MicroPython API but on the STM32-based PyBoard rather than the Raspberry Pi Pico).
연관제품
- 연관제품 1


 "19세 미만의 미성년자"는 출입을 금합니다!
"19세 미만의 미성년자"는 출입을 금합니다!